



.webp)
空间是人类的第四生存空间,也是国际战略竞争的制高点,美国、俄罗斯等国纷纷建立“天军”,意图占领空间,保持战略竞争优势。习近平总书记也在多个场合发表重要讲话,指出“加强新型太空力量建设是我国迈向航天强国的必然选择,是国防和军队现代化加深的战略重点,是国家安全体系之集大成者”。而保持太空竞争的关键重要抓手是空间目标操作与控制技术。
航天器在轨维护是最能体现空间目标操作与控制技术实力的重要任务。依托航天器在轨维护研究空间目标操作与控制一直是当前各国航天强国研究与教学的热点。但在空间在轨维护中,由于空间失重环境与天地通信的特殊性,机器人近距离交会、运动学、协调控制、天地时延等很难模拟,尤其是空间机器人特有的非完整运动规划在地面环境完全无法模拟,导致学生仅能通过书本学习相关知识,严重缺乏对空间机器人、在轨服务的理解,在学习中完全依靠想象,教学效率极低,学生接收难度极大。本
虚拟仿真实验依托西北工业大学航天学院、航天飞行动力学国家级重点实验室建设,通过虚拟仿真形式使学生多角度直观理解与学习空间交会任务/在轨服务任务设计、机器人运动规划、协调控制、天地遥操作等,与理论相结合,显著提升教学效果,并引导学生深入学习。
实验的详细开设目的:
1、解决空间失重环境难以模拟的问题。地面模拟空间失重环境需要气浮台、中性浮力水池或吊丝配重等复杂昂贵的实验设施提供空间系统地面实验必备的模拟失重环境,但是不同的失重模拟设施和方法均难以完全消除环境力,无法完全模拟失重运行环境;同时,空间机器人为复杂多体系统,其运动自由度远超于卫星等单体航天器,现有失重模拟设施模拟其复杂运动特性有较大的技术难度,而利用虚拟仿真实验可以更真实的模拟空间机器人在失重环境下的复杂动力学特性。
2、解决空间机器人系统实验设备不足问题。
空间操作实验需要空间机器人实验系统等昂贵的设备,国内只有极少数高校和研究所具备相关设备,数量极其有限,且需要昂贵的运行成本。因此,只能采用分组的方式进行实验,无法让每位学生全面、全程参与到实践教学中,无法保证实践教学质量,而利用虚拟仿真实验平台可以极大降低实验平台的可获得性,有效提高实验教学效果。
3、解决实验系统受限的问题。
受限于设备研制成本等因素,通常仅设计一种或几种典型设备,设备类型不足从根本上制约了实验类型的多样性,严重限制探索性创新实验的开展。利用虚拟仿真实验可以突破实体实验系统的制约,通过参数化设计方法按实验任务需求设计不同的空间机器人系统,充分发挥学生的主观能动性和创新热情,完成不同类型的创新实验。
4、降低实验设备及实验人员安全风险。
空间机器人系统组成复杂,系统操作难度较高,需要有较为丰富的经验,若调试不当可能发生碰撞等情况,有可能损坏设备甚至造成人员伤害。通过虚拟仿真实验可以用较低成本让每个学生均可安全地参与到空间机器人系统的操作实践中,同时可以起到“虚实结合”,降低学生在高年级和研究生阶段操作实体机器人系统实验的风险。
5、提升开放范围,让更多的人可以获得优质教育资源。
西北工业大学在航空航天、兵器等相关学科有深厚的教学和科研积累,是国内开设空间维护技术相关实验的极少数高校之一。通过奈飞拼车官网,可以将西北工业大学在空间操作技术方向的科研优势和教学优势向公众开放,为所有有意学习的学生及社会人员提供一个随时可得的实验平台,实现优质教育资源的开放和共享,让更多的人收益。

本虚拟仿真实验的教学目的:
1、理解空间操作任务的流程。
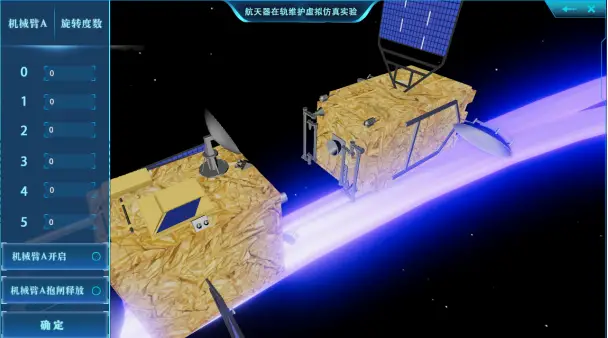
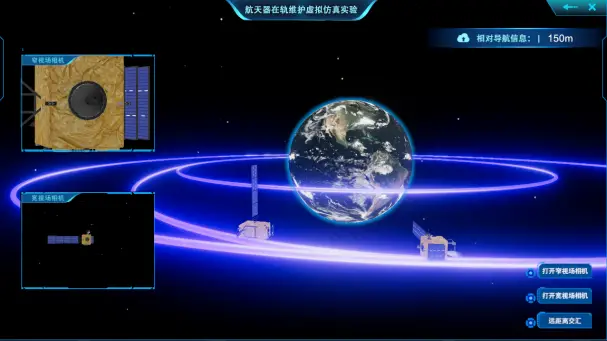
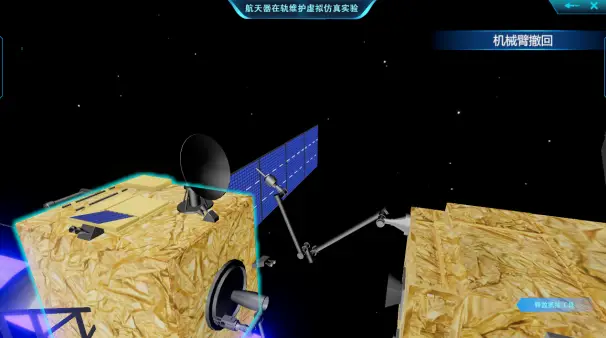
通过虚拟仿真实验,使学生能够全流程参与复杂空间操作任务的方案设计、测试和实施过程,完成典型空间操作任务,了解失效航天器在轨维护任务的关键环节,加强学生对《空间机器人基础》等课程理论知识的认识;

2、掌握空间机器人系统组成、工作原理和动力学特性。
通过虚拟仿真实验,使学生了解空间机器人在空间操作任务中的作用,熟悉空间机器人的系统的运动学和动力学建模,根据空间机器人的运动,理解空间机器人的动力学特性;
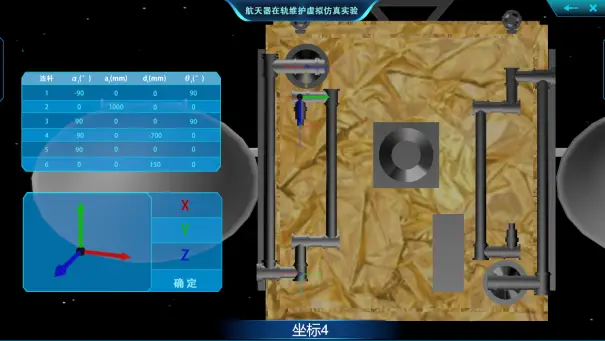
3、掌握空间机器人运动规划技术。
根据空间操作任务需求,设计任务关键步骤的空间机器人运动路径,通过实践加深学生对不同路径规划算法的理解。

4、加深对航天前沿技术的了解。
空间操作技术虚拟仿真实验为大学生提供了具体实用化的空间操作任务和场景,让学生能够接触航天技术发展前沿,体会航天技术发展方向,体验前沿科研的工作方法。

5、培养自身科研基本技能。
基于虚拟仿真实验平台开展科研训练,通过创新性实验项目,针对空间操作任务中的不同问题,通过严谨的工作方法、灵活创新的解决手段和团队的通力协作,逐步攻克难题,从而激发学生对科研探索的激情,树立自力更生、艰苦奋斗、大力协作、无私奉献、严谨务实、勇于攀登的航天传统精神。