



.webp)
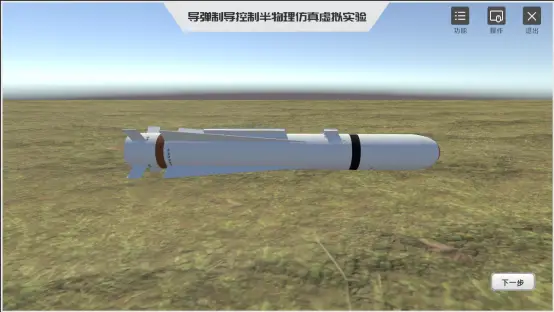
导弹武器系统制导控制半物理仿真实验理论性强,具有综合性、专业性和多学科交叉的特点。由于现场实验系统造价高昂,且实验规模大、容易出现转台“飞车”等危险状况,因此难以采用传统手段开展实验教学。我院依托陕西省空天飞行技术重点实验室和陕西省航天创新实验教学中心,建成了导弹制导控制半物理仿真虚拟实验平台,同学们可通过本平台进行导弹飞行性能分析以及制导控制系统半物理仿真实验。
实验目的:改变导弹外形,通过实验分析导弹静稳定性、动稳定性以及操纵性等动力学特性;设计制导律和自动驾驶仪参数,通过半物理仿真实验考核导弹的制导、控制系统性能。
实验内容包括:1、导弹的静稳定性和动稳定性分析;2、导弹的操纵性和弹体频域特性分析;3、导弹的制导律和自动驾驶仪参数设计;4、制导控制系统半物理仿真;5、数据分析和报告撰写。
实验方法:改变导弹的弹翼和重心位置,产生不同的导弹动态性能,观察附加扰动攻角的运动过程,得到导弹静稳定性和动稳定性的结论。舵面引入阶跃偏转和正弦模态偏转,观察弹体的姿态运动过程,实验导弹的操纵性和幅频特性。设定比例导引系数、自动驾驶仪增益等,观察方案飞行、自寻的导引飞行下的制导和控制性能。设定舵机参数、惯组干扰参数等,观察制导控制系统半物理实验环境下的性能。
实验要求:1、实验前了解实验目的、内容和方法;2、掌握导弹动力学特性的分析方法,制导控制系统的设计方法和半物理仿真的实验方法;3、理解实验测试数据的含义和分析方法;4、完成实验过程和实验后的测试试题。
实验注意事项: 1、实验过程须按照实验步骤正确操作,依次完成各项实验内容;2、认真撰写实验报告。
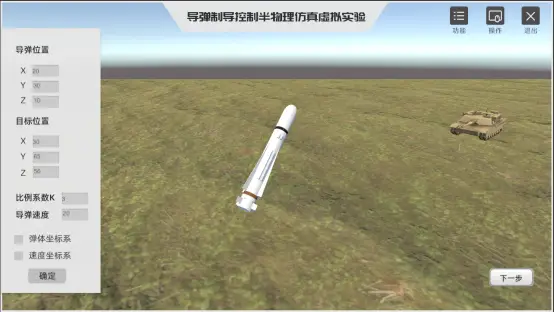
实验操作包括以下12个步骤,
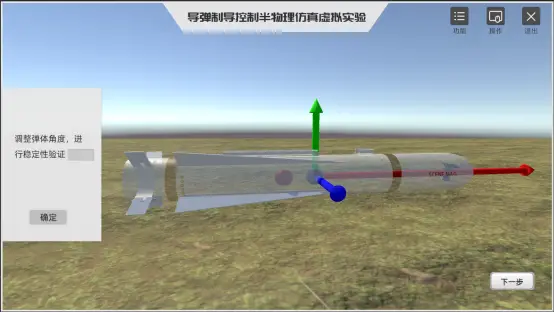
第一步:试验概况认知。观察导弹外形配置,认识实验体系的基本组成。
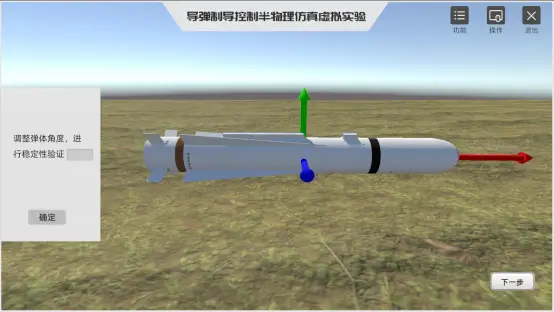
第二步:导弹外形调制。按照静稳定度要求,改变弹翼和重心位置。
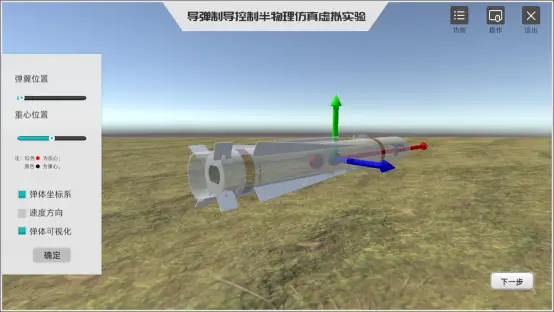
第三步:静稳定性分析。设定扰动攻角,观察导弹的受力和力矩。
第四步:动稳定性分析。设定扰动攻角,观察导弹的姿态运动过程。

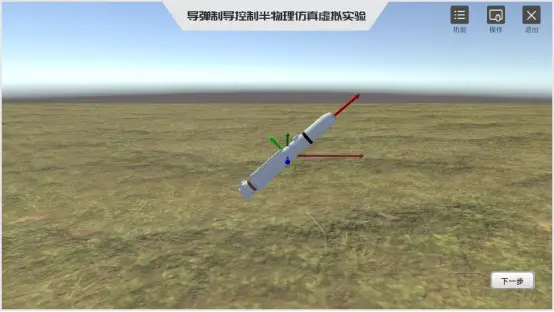
第五步:操纵性分析。设置等效舵偏,观察导弹舵面阶跃偏转,并观察导弹的姿态运动过程。

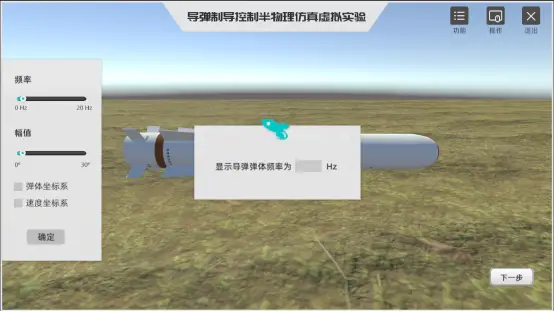
第六步:弹体频域特性分析。设定舵偏的频率和幅度,观察弹体的运动过程,通过实验确定弹体的固有频率和截止频率。
第七步:初始对准和欧拉坐标变换。按照实验要求,确定坐标旋转顺序和欧拉角,旋转导弹到要求的姿态角和气动角。

第八步:方案飞行方式。设定导弹的俯仰角变化规律,设定导弹的自动驾驶仪增益,观察导弹是否能够方案飞行。


第九步:寻的制导飞行。设定导弹的比例导引系统,弹、目位置观察导弹是否能够命中目标。

第十步:半物理仿真实验。设定舵机动态参数,惯组的干扰参数,实验导弹的飞行过程和脱靶量。

第十一步:实验数据分析。根据采集到的俯仰姿态角变化、舵偏角变化以及脱靶量,分析导弹的制导控制性能。
第十二步:实验报告编写。根据实验操作的时长和正确率等指标,给出评分情况;认真填写感想和建议部分,完成实验报告撰写。
感谢参与,祝学习愉快!